אני חושב שהגישה הטובה ביותר היא לנסות להבין דוגמה קונקרטית:
בואו נסתכל על פיסת המישור האוקלידי המתואמת על ידי $ x ^ a = (x, y); a = 1,2 $ ברשת מלבנית נחמדה עם מדד אוקלידי. עכשיו נניח שאנחנו מגדירים טרנספורמציה $$ X (x, y) = x (1+ \ alpha y ^ 2) $$ $$ Y (x, y) = y (1+ \ alpha x ^ 2) $$ $ \ אלפא $ הוא רק קבוע, אותו ניקח בתור 5/512 - לצורך היכולת לצייר דיאגרמות. נקודה P עם קואורדינטות $ (x, y) = (8,8) $ ממופה לנקודה P 'עם קואורדינטות $ (X, Y) = (13,13) $.
תצוגה פסיבית
כאן אנו לא חושבים על P ו- P 'כנקודות שונות, אלא באותה נקודה ו- $ (13,13) $ הם רק הקואורדינטות של P במערכת הקואורדינטות החדשה $ X ^ a $. 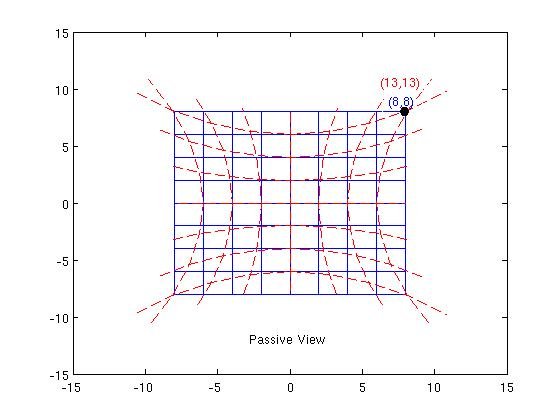
בתמונה, הקווים הכחולים הם קווי הקואורדינטות $ x ^ a = $ const והקווים האדומים הם קווי הקואורדינטות $ X ^ a = $ const. רכיבים מטריים בסעפת שלנו $ g_ {ab} (x) $ ממופים לערכים חדשים $$ h_ {ab} (X) = {\ frac {\ partial x ^ c} {\ partial X ^ a}} {\ frac {\ partial x ^ d} {\ partial X ^ b}} g_ {cd} (x) \ \ \ (1) $$ זה מייצג את אותו אובייקט גיאומטרי מאז $$ h_ {ab} (X) dX ^ a \ otimes dX ^ b = g_ {ab} (x) dx ^ a \ otimes dx ^ b $$
Active View
תיאור אחד של התצוגה הפעילה שמשתמשים בו לפעמים הוא נקודות "נעים סביב" (במובן מסוים אולי עדיף לחשוב רק על קשר בין נקודות, "זז" מרמז "ביחס לרקע כלשהו"). אז בדוגמה שלנו, היינו חושבים על הנקודה P כאילו היא "נמתחת" למיקום החדש P '. (מיקומים אלה הם ביחס למערכת הקואורדינטות הישנה $ x $). 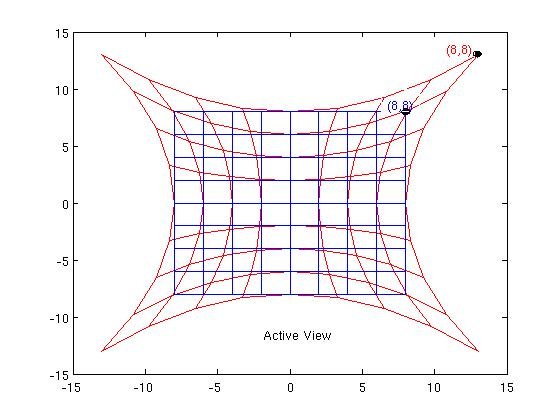
שורות הקואורדינטות הקבועות (הכחולות) $ x = $ נגררות גם יחד אל הקווים האדומים המוצגים בתרשים. אז הנקודה P שומרת על ערכי הקואורדינטות הישנים שלה $ (8,8) $ במיקומה החדש, כלומר $ (X, Y) = (8,8) $. המדד נגרר גם יחד (ראה למשל לוסאנה) על פי: $$ h_ {ab} (X) | _ {P '} \ dX ^ a \ otimes dX ^ b = g_ {ab } (x) | _ {P} \ dx ^ a \ otimes dx ^ b \ \ \ (2) $$ אז המדד האוקלידי הישן $ dx ^ 2 + dy ^ 2 $ הופך ל- $ dX ^ 2 + dY ^ 2 $ , כלומר עדיין אוקלידית בתרשים $ (X, Y) $ החדש - שום דבר לא השתנה. כך, למשל, הזווית בין הווקטורים האדומים $ \ frac {\ partial} {\ partial X} $, $ \ frac {\ partial} {\ partial Y} $ עדיין 90 מעלות, כפי שהייתה לגבי הווקטורים הכחולים $ \ frac {\ partial} {\ partial x} $, $ \ frac {\ partial} {\ partial y} $! הניחוש שלי הוא שזה מה שמתכוון וולד בשוויון הגופני - בדוגמה זו מדד אוקלידי נותר אוקלידי.
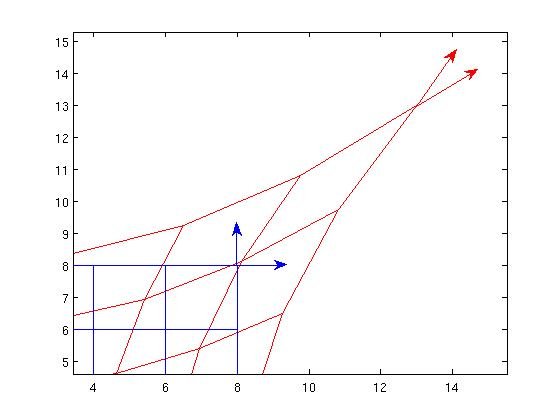
עכשיו, אם נסתכל על הווקטורים האדומים מנקודת מבט של המסגרת הכחולה, הם בטוח לא נראים אורתוגונליים *, אז מהנקודה הכחולה לראייה, זה יכול להיות רק מדד חדש שבו הווקטורים האדומים אורתוגונליים. כך שניתן לפרש דיפרומורפיזמים פעילים כמייצרים מדדים חדשים.
כעת נניח שיש לנו זמן מרחב - סעפת עם מדד שהניינר טנזור $ G _ {\ mu \ nu} $ נעלם. אם אנו משתמשים בדיפיומורפיזם פעיל, אנו יכולים ליצור את הגרירה של טנזור איינשטיין על ידי כלל המקביל ל- (2). כפי שדנו, אם נשווה את מדד הגרירה עם הישן באותם קואורדינטות, אנו רואים שיש לנו זמן מרחב עם מדד חדש. יתרה מזאת, זמן החלל החדש חייב להיות גם טנזור איינשטיין הנעלם - על ידי האנלוג של (2), העובדה שהוא נעלם במערכת הישנה פירושה שהוא נעלם במערכת החדשה ומכאן שגם הטנזור החדש שלנו שנוצר באינשטיין נעלם (אם טנזור נעלם. במערך אחד של קואורדינטות הוא נעלם בסך הכל).
מבחינה זו, המשתנות של משוואות איינשטיין תחת דיפרומורפיזם פעיל היא מיוחדת. אם ניקח, למשל, את משוואת הגל במרחב מעוקל $$ (g ^ {\ mu \ nu} {\ nabla} _ {\ mu} {\ nabla} _ {\ nu} + \ xi R) \ phi ( x) = 0 $$ ואז דיפרומורפיזם פעיל אינו לוקח פתרונות לפתרונות באופן טבעי - הם משנים את המדד, והמדד במשוואה זו הוא חלק מהרקע וקבוע. לעומת זאת, במשוואות של איינשטיין, המדד הוא
מה שאתה פותר עבורו כל כך מובנה אי-משתנות פעילה דיפרומורפית.
* פשוט חישב את הווקטורים $ \ frac {\ partial} {\ partial X}, \ frac {\ partial} {\ partial Y} $ במונחים של $ \ frac {\ partial} {\ partial x} $, $ \ frac {\ partial} {\ partial y} $ ובדיקה האורתוגונליות שלהם באמצעות המדד האוקלידי המקורי.